Новости
Завершился первый «Космо-Хакатон»
На базе филиала НПО им. С.А.Лавочкина и детского технопарка «Кванториум» в г. Калуга совместно с ФГАУ «Фонд новых форм развития образования» состоялся первый «Космо-Хакатон».
«Космо-Хакатон» — это мероприятия, организованные Госкорпорацией «Роскосмос» совместно с ФГАУ «Фонд новых форм развития образования» (федеральный оператор сети детских технопарков «Кванториум») по профильному тематическому направлению «Космоквантум». В его рамках команды воспитанников детских технопарков «Кванториум» на базе предприятий ракетно-космической отрасли совместно с ведущими отраслевыми экспертами решают инженерно-технические задачи в интересах развития российской космонавтики.
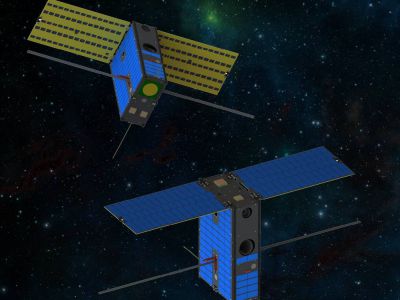
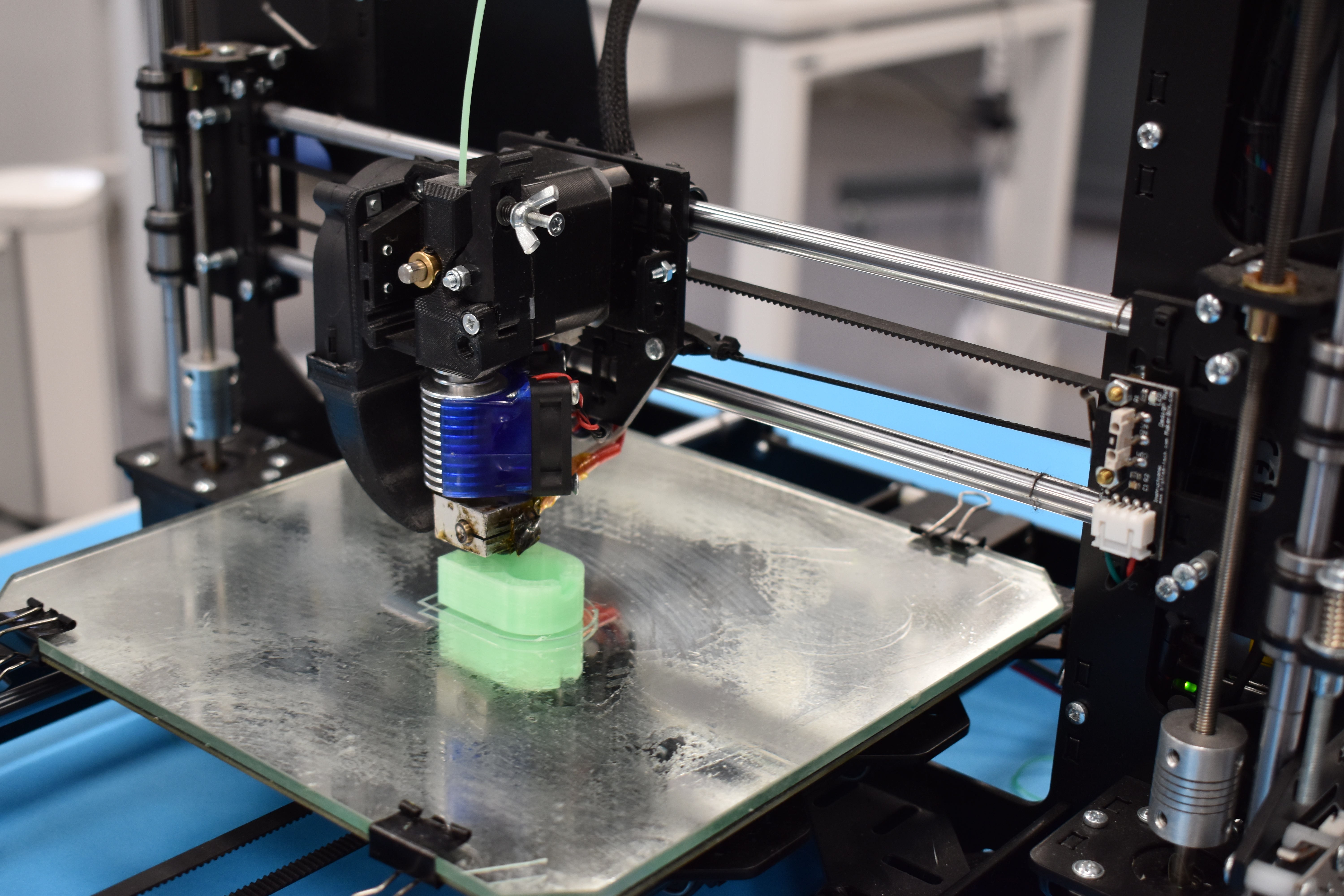
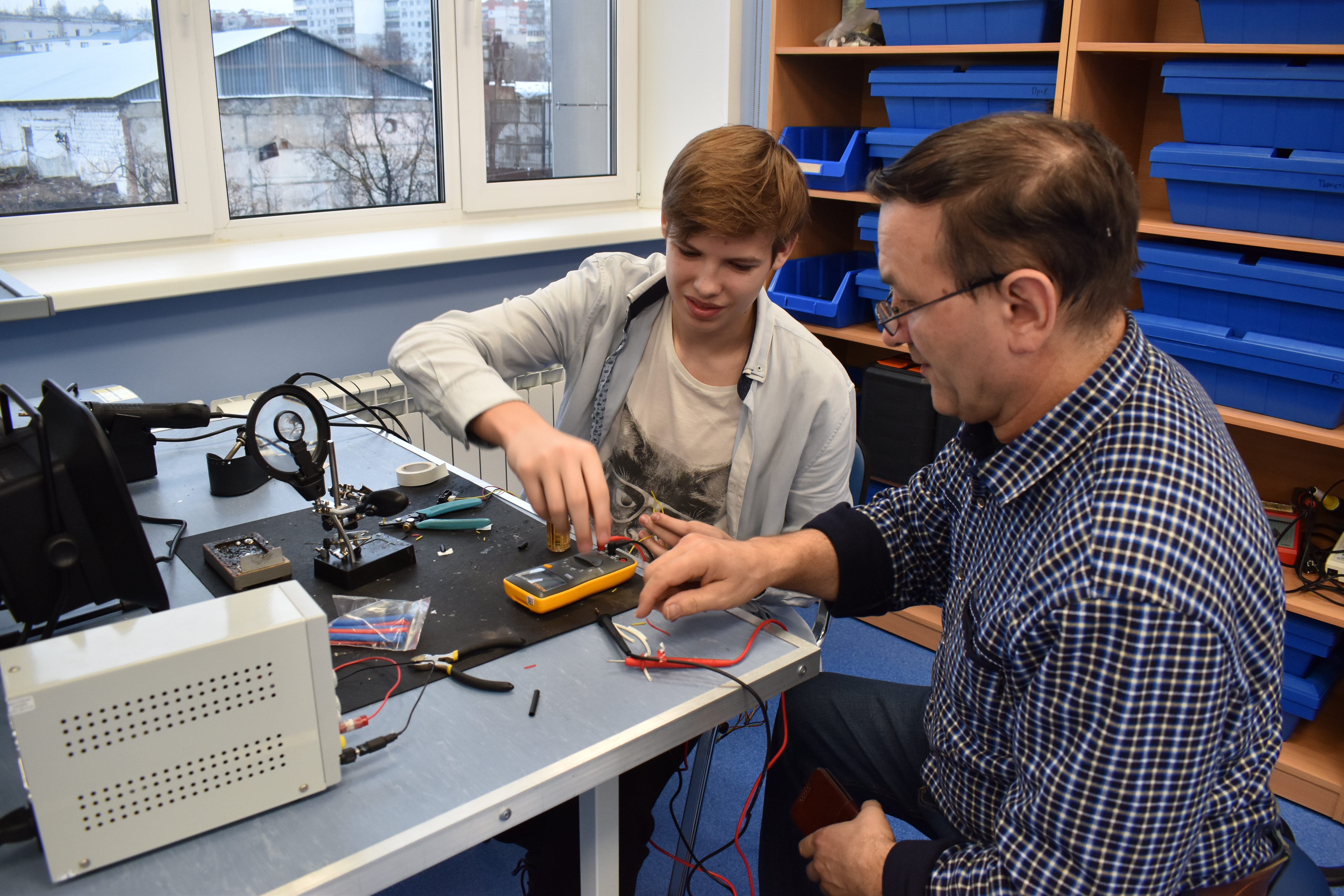
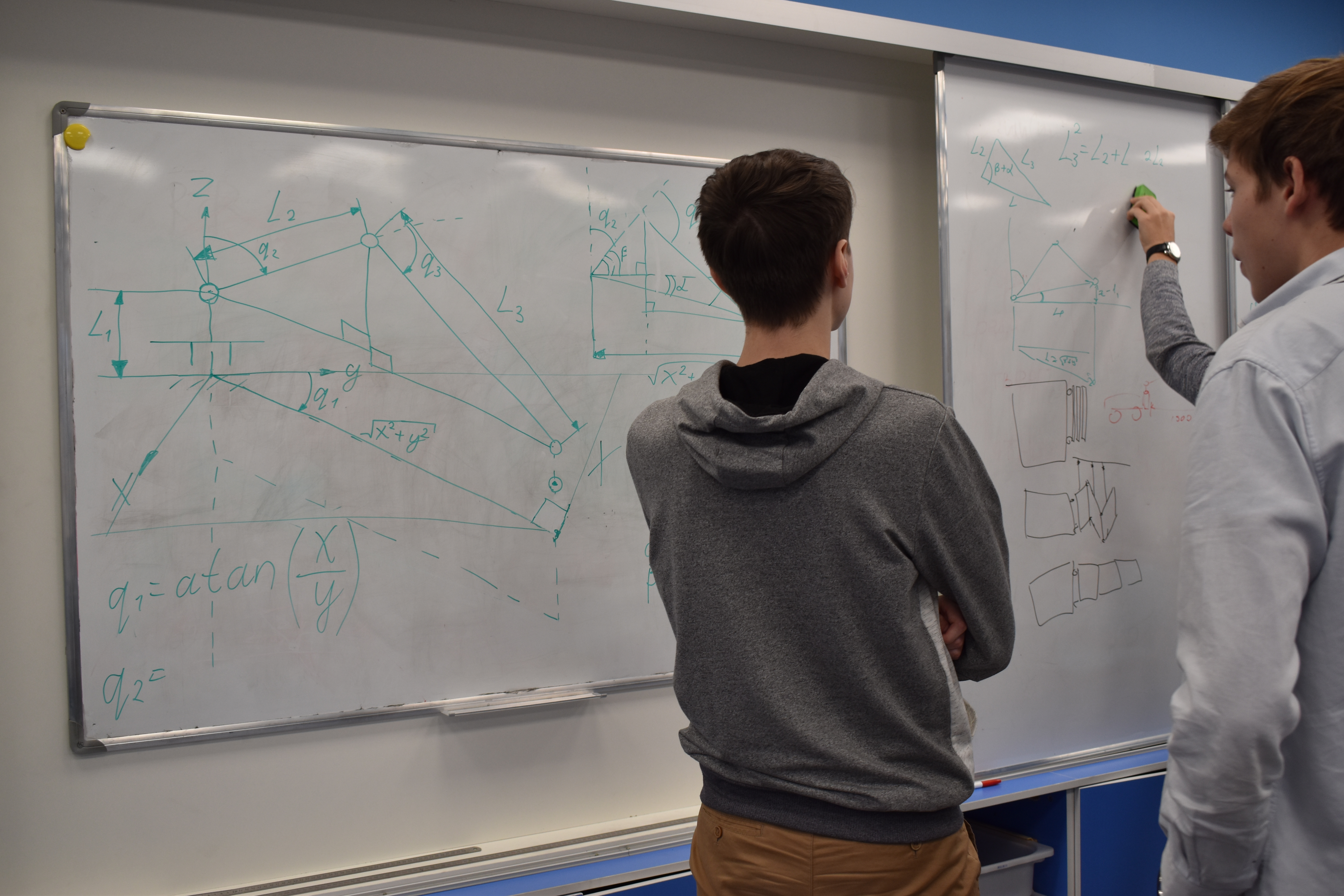
Первый «Космо-Хакатон» был посвящен решению задачи, связанной с созданием лабораторного испытательного макета для отработки алгоритмов управления манипулятором автоматической космической системы с универсальным креплением для полезной нагрузки в виде «лунного грунта». Команда в течение четырех дней работала над поставленной задачей, создавая чертежи, модели и макеты манипулятора, соблюдая необходимые расчеты. В состав команды вошли обучающиеся детского технопарка «Кванториум», студенты машиностроительного факультета филиала МГТУ им. Н.Э.Баумана в г. Калуга, инженеры-конструкторы филиала НПО им. С.А.Лавочкина, которые на практике показали навыки командной работы, а также свои компетенции в инженерии космической сферы.
Напомним, что профильное тематическое направление «Космоквантум» сети детских технопарков «Кванториум» призвано погрузить воспитанников в различные инженерно-технические задачи для дальнейшего формирования кадрового потенциала ракетно-космической отрасли.
Защита результатов первого «Космо-Хакатона» состоялась 13 декабря 2019 года. В рамках завершающего этапа команда воспитанников провела демонстрацию результатов совместной работы, а также провела рефлексию по направлениям взаимодействия между всеми участниками проектной команды. Результатом работы стал макет манипулятора автоматической космической системы, который будет темой дипломных работ студентов на кафедре «Мехатроника и робототехнические системы» Калужского филиала МГТУ им. Н.Э.Баумана, а дальнейшей отработкой алгоритма управления манипулятором займутся специалисты с предприятия — филиала НПО им. С.А.Лавочкина в г. Калуге.







 26.08.2024
Интенсив для участников проекта «Космический класс»
#Космические классы#Роскосмос#Образовательная среда
26.08.2024
Интенсив для участников проекта «Космический класс»
#Космические классы#Роскосмос#Образовательная среда


 19.08.2024
Лучшие молодые специалисты Роскосмоса посетили Байконур
#Команда будущего#Роскосмос#Орбита молодежи
19.08.2024
Лучшие молодые специалисты Роскосмоса посетили Байконур
#Команда будущего#Роскосмос#Орбита молодежи

 16.08.2024
Юрий Борисов рассказал о работе Роскосмоса участникам форума «Территория смыслов»
#Роскосмос#Команда будущего
16.08.2024
Юрий Борисов рассказал о работе Роскосмоса участникам форума «Территория смыслов»
#Роскосмос#Команда будущего
 16.08.2024
В Орленке начали работу лаборатории профильной космической смены
#Ключ на старт#Космос для детей#Роскосмос#Космические смены#ВДЦ Орленок
16.08.2024
В Орленке начали работу лаборатории профильной космической смены
#Ключ на старт#Космос для детей#Роскосмос#Космические смены#ВДЦ Орленок